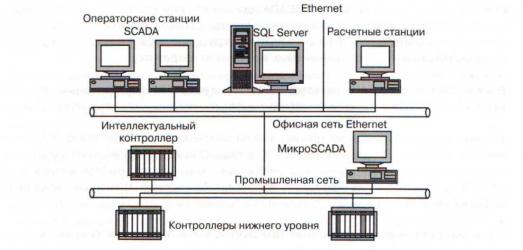
Многие проекты автоматизированных систем контроля и управления (СКУ) для большого спектра областей применения позволяют выделить обобщенную схему их реализации, представленную на рис. 1.
Рис. 1. Обобщенная схема системы контроля и управления
Как правило, это двухуровневые системы, так как именно на этих уровнях реализуется непосредственное управление технологическими процессами. Специфика каждой конкретной системы управления определяется используемой на каждом уровне программно-аппаратной платформой. 1. Нижний уровень - уровень объекта (контроллерный) - включает различные датчики для сбора информации о ходе технологического процесса, электроприводы и исполнительные механизмы для реализации регулирующих и управляющих воздействий. Датчики поставляют информацию локальным программируемым логическим контроллерам (PLC - Programming Logical Controller), которые могут выполнять следующие функции:
• сбор и обработку информации о параметрах технологического процесса;
• управление электроприводами и другими исполнительными механизмами;
• решение задач автоматического логического управления и др.
Так как информация в контроллерах предварительно обрабатывается и частично используется на месте, существенно снижаются требования к пропускной способности каналов связи. В качестве локальных PLC в системах контроля и управления различными технологическими процессами в настоящее время применяются контроллеры как отечественных, так и зарубежных производителей. На рынке представлены сотни типов контроллеров, способных обрабатывать от нескольких десятков до нескольких десятков тысяч переменных. К аппаратно-программным средствам контроллерного уровня управления предъявляются жесткие требования по надежности, времени реакции на исполнительные устройства, датчики и т.д. Программируемые логические контроллеры должны гарантированно откликаться на внешние события, поступающие от объекта, за время, определенное для каждого события. Для критичных с этой точки зрения объектов рекомендуется использовать контроллеры с операционными системами реального времени (ОСРВ). Контроллеры под управлением ОСРВ функционируют в режиме жесткого реального времени. Разработка, отладка и исполнение программ управления локальными контроллерами осуществляется с помощью специализированного программного обеспечения (ПО), широко представленного на рынке. К этому классу инструментального ПО относятся пакеты типа ISaGRAF (CJ International France), InConrol (Wonderware, USA), Paradym 31 (Intellution, USA), имеющие открытую архитектуру.
2. Информация с локальных контроллеров может направляться в сеть диспетчерского пункта непосредственно, а также через контроллеры верхнего уровня. В зависимости от поставленной задачи контроллеры верхнего уровня (концентраторы, интеллектуальные или коммуникационные контроллеры) реализуют различные функции. Некоторые из них перечислены ниже:
• сбор данных с локальных контроллеров;
• обработка данных, включая масштабирование;
• поддержание единого времени в системе;
• синхронизация работы подсистем;
• организация архивов по выбранным параметрам;
• обмен информацией между локальными контроллерами и верхним уровнем;
• работа в автономном режиме при нарушениях связи с верхним уровнем;
• резервирование каналов передачи данных и др.
3. Верхний уровень - диспетчерский пункт (ДП) - включает, прежде всего, одну или несколько станций управления, представляющих собой автоматизированное рабочее место (АРМ) диспетчера/оператора. Здесь же могут быть размещены: сервер базы данных, рабочие места (компьютеры) для специалистов и т. д. Часто в качестве рабочих станций используются ПЭВМ типа IBM PC различных конфигураций. Станции управления предназначены для отображения хода технологического процесса и оперативного управления. Эти задачи и призваны решать SCADAсистемы. SCADA - это специализированное ПО, ориентированное на обеспечение интерфейса между диспетчером и системой управления, а также коммуникацию с внешним миром. Спектр функциональных возможностей определен самой ролью SCADA в системах управления и реализован практически во всех пакетах:
• автоматизированная разработка, дающая возможность создания ПО системы
• автоматизации без реального программирования;
• средства исполнения прикладных программ;
• сбор первичной информации от устройств нижнего уровня;
• обработка первичной информации;
• регистрация алармов и исторических данных;
• хранение информации с возможностью ее постобработки (как правило, реализуется через интерфейсы к наиболее популярным базам данных);
• визуализация информации в виде мнемосхем, графиков и т.п.;
• возможность работы прикладной системы с наборами параметров, рассматриваемых как «единое целое» (recipe или «установки»).
Рассматривая обобщенную структуру систем управления, следует ввести и еще одно понятие - Micro-SCADA. Micro-SCADA - это системы, реализующие стандартные (базовые) функции, присущие SCADA-системам верхнего уровня, но ориентированные на решение задач автоматизации в определенной отрасли (узкоспециализированные). В противоположность им SCADA-системы верхнего уровня являются универсальными. 4. Все компоненты системы управления объединены между собой каналами связи. Обеспечение взаимодействия SCADA-систем с локальными контроллерами, контроллерами верхнего уровня, офисными и промышленными сетями возложено на так называемое коммуникационное ПО. Это достаточно широкий класс программного обеспечения, выбор которого для конкретной системы управления определяется многими факторами, в том числе и типом применяемых контроллеров, и используемой SCADA-системой 5. Большой объем информации, непрерывно поступающий с устройств ввода/вывода систем управления, предопределяет наличие в таких системах баз данных (БД). Основная задача баз данных - своевременно обеспечить пользователя всех уровней управления требуемой информацией. Но если на верхних уровнях АСУ эта задача решена с помощью традиционных БД, то этого не скажешь об уровне АСУТП. До недавнего времени регистрация информации в реальном времени решалась на базе ПО интеллектуальных контроллеров и SCADA-систем. В последнее время появились новые возможности по обеспечению высокоскоростного хранения информации в БД. 6. Бурное развитие Интернета не могло не привлечь внимание производителей программного продукта SCADA. Возможно ли применение Интернет-технологий в системах управления технологическими процессами? Если да, то какие решения предлагаются в настоящее время компаниями-разработчиками? |