Для организации взаимодействия с контроллерами могут быть использованы:
• СОМ-порты В этом случае контроллер или объединенные сетью контроллеры подключаются по протоколам RS-232, RS-422, RS-485;
• сетевые платы. Использование такой аппаратной поддержки возможно, если соответствующие контроллеры снабжены интерфейсным выходом на Ethernet;
• вставные платы. В этом случае протокол взаимодействия определяется платой и может быть уникальным. В настоящее время предлагаются реализации в
стандартах ISA, PCI, CompactPCI.
Прикладные протоколы, используемые для организации взаимодействия с контроллерами, оставлены за границей этой книги.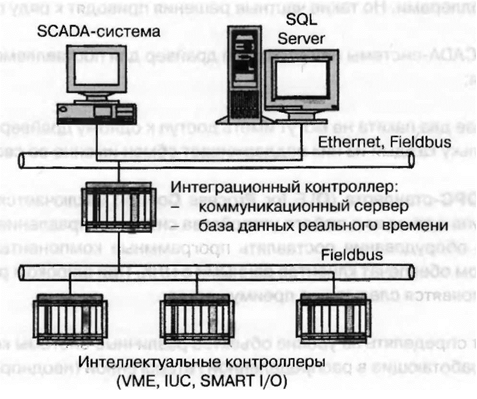
Рис. 2.1. Типовая архитектура системы управления
Перед рассмотрением реализации связи с устройствами ввода/вывода в SCADA-системах InTouch и Citect читателю предлагается общий взгляд на организацию коммуникационного ПО в системах управления (рис. 2.1).
Коммуникационное ПО является многоуровневым. Количество уровней зависит от используемой операционной системы. Так, Applicom предлагает поддержку для следующих ОС: MS-DOS, UNIX SCO, HP-UX V10, OS/2, MS Windows 3.x^ Windows 95/98, Windows NT4 на Intel и Alpha-платформах. Для Windows-платформ ПО включает следующие компоненты:
• статическую библиотеку, используемую с традиционными языками программирования, такими, как С, С++, Pascal;
• динамическую библиотеку (DLL), применяемую со всеми Windows языками программирования (Visual Basic, Visual C/C++, Borland C/C++, Delphi, LabWindows CVI, LabView);
• DDE-сервер, имеющий 16- и 32-битные реализации;
• пакетные реализации DDE-протокола: FastDDE для продуктов линии Wonderware и AdvancedDDE для Rockwell-линии;
• SuiteLink-сервер, реализующий механизм обмена по SuiteLink-протоколу, используемому компонентами пакета FactorySuite (Wonderware);
• ОРС-сервер, поддерживающий интерфейс, определенный ОРС-спецификацией.
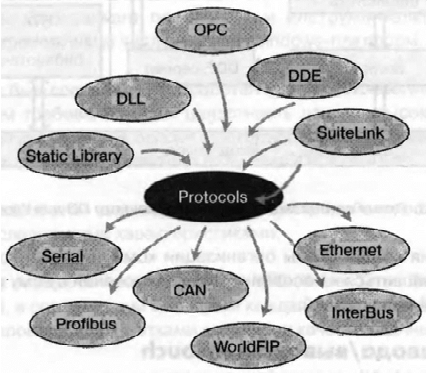
На рис. 2.2 показаны программные интерфейсы для Windows-приложений (в том числе и SCADA-систем) и спектр широко распространенных промышленных протоколов. Рис. 2.2. Набор интерфейсов для ЭСАОА-систем и спектр поддерживаемых протоколов
Использование этих протоколов позволяет организовать взаимодействие с контроллерами, устройствами, объединенными промышленными (fieldbuses) и обычными сетями. Предлагаемая схема решения позволяет конечному пользователю, системному интегратору единообразным способом организовать взаимодействие между ПО верхнего уровня и платами, специфичными для каждого типа промышленных сетей.
DDE-, ОРС-компоненты являются серверами по отношению к SCADA-системам. По отношению к ПО нижнего уровня (fieldbus) возможна организация Master/Slave и Client/Server. Внешние устройства способны посылать и принимать данные через плату. Когда вставляемая в персональный компьютер плата является Master/Client, то именно плата с поддерживаемым ПО является инициатором опроса промышленных устройств. В случае применения плат типа Siave/Server они реагируют на запросы внешних устройств.
На некоторых вставных платах имеется разделяемая область памяти. Эта память доступна как приложению в ПК, так и встраиваемому ПО.
На рис. 2.3 представлена обобщенная схема организации коммуникационного ПО для Windows NT.
На предлагаемой схеме отражены как традиционные решения на базе стандартных Windows NT-драйверов, так и с использованием библиотек, реализованных в расширении реального времени RTXot VenturCom.
Рис. 2.3. Схема организации коммуникационного ПО для Windows NT
|